OpenClaw和Claude的AgentLoop在LLM对话层的结构化预处理
0条评论 2026-3-26

基于与 OpenClaw 源码的对话整理,2026-03-25任何一个用过收费大模型的人,普遍会有一个感觉,就是Token用量相对于最初的chatGPT 3.X 有了惊人增长。 表面上看,Token价格并非高不可攀,但落实到付费账单上的收费却又让人不忍噤声。那么这么多的Token都花到了哪里,Ope
LuatOS sys 模块加载机制详解
0条评论 2026-2-2
目录模块类型对比sys 模块加载流程字节码生成机制VFS 虚拟文件系统如何更新 sys 模块模块类型对比C 模块 vs Lua 模块LuatOS 中有两种类型的模块,使用方式完全不同:特征C 模块(如 gpio, ledstrip)Lua 模块(如 sys)文件类型.c 文件.lua 文件注册方式l
WinServer服务器上动态更新https证书的一种方法
0条评论 2026-1-5

首先使用记事本编辑建立如下证书生成配置文件@echo off
:: 配置文件生成教程
:: 域名(多个域名用逗号隔开)
:: 请将您的域名替换到这里,如果有多域名,用逗号分隔
set DOMAIN=luafans.com,www.luafans.com
:: 网站根目录路径(验证文件会放在这里)
LuatOS API 文档编写规范
0条评论 2025-12-26
LuatOS 的 API 文档采用特殊注释格式嵌入在 C/Lua 源码中,通过 apiMaker 工具自动解析生成 Markdown 文档和 VSCode 自动补全文件。一、文档结构概述文档注释分为两个层级:层级说明位置模块级注释描述整个库/模块的基本信息文件开头API级注释描述单个函数/接口每个函
右键添加使用管理员权限打开cmd.exe的功能
1条评论 2023-9-7
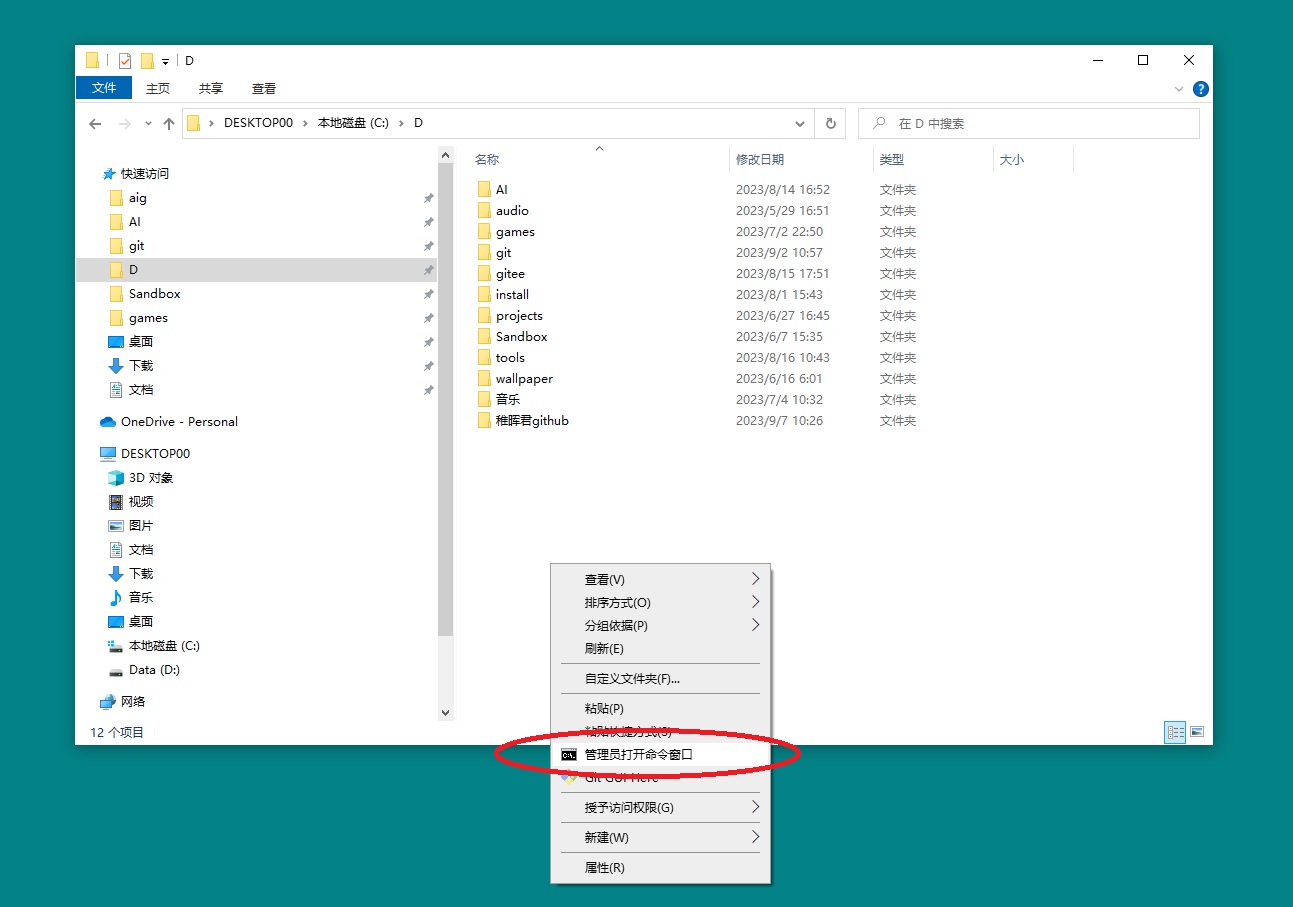
如果你想在win10环境下,为右键增加使用管理员权限打开cmd.exe的功能,请使用附件中的注册表文件,双击执行即可附件 regcmd
chatGPT demo
1条评论 2023-5-6
1 这是一个基于chatGPT3.5 Turbo API接口的聊天程序,服务端需要架梯子,这样客户端访问网页就不需要架梯子了。 我用的是腾讯云服务器+服务端Clash,效果感觉还凑合。
2 我不会写Python代码,其中80%以上的代码是我跟chatGPT聊天让他帮我写的,剩余少量代码是Google
常见开源硬件协议的使用规定
1条评论 2023-3-15

近几年,开源硬件风起云涌,相对而生则出现了一系列的开源协议,协议大多为英文,且法律语言味很浓,不易理解。我在这里根据ChatGPT的回复,做一个简单的记录。Public Domain作者弃权,随便玩公有领域(Public Domain)是指任何人都可以自由使用、修改、分发和复制的作品或发明。 在公共
用Esp32-c3 圣诞点灯
1条评论 2022-12-25

圣诞点灯2022年,大家过的都挺不容易的。终于挺到了圣诞节,我就又用手头的小开发板做了个圣诞树,区别于去年用的air101,今年用的是Esp32-C3这颗芯片的开发板,依然是合宙出品。下面是购买的链接:https://item.taobao.com/item.htm?spm=a312a.770082
ESP32 固件下载器-首发
1条评论 2022-10-1
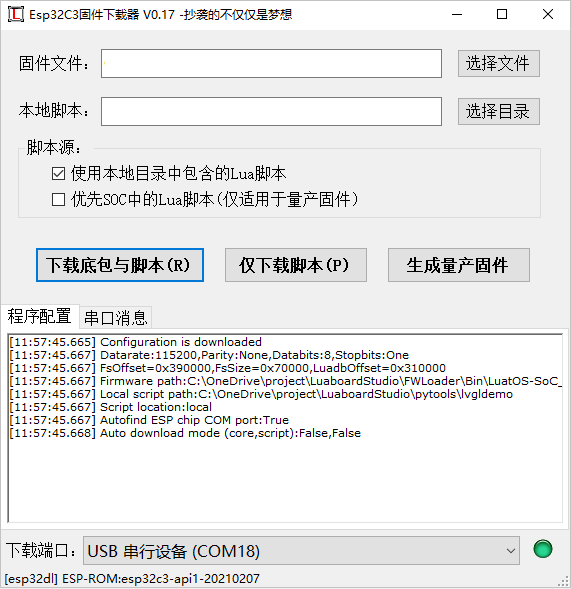
功能简介ESP32C3 固件下载器是一个使用C#语言为ESP32-C3芯片定制的固件下载器,能够全自动的对Esp32-C3系列芯片完成从硬件插入到固件烧写的全过程操作且无需人工干预,烧录完成后通过简明的颜色方式输出烧写结果。除标准的乐鑫公司的bin固件,本软件还支持烧写上海合宙出品的LuatoS主板
使用合宙官方平台进行固件OTA在线升级流程
1条评论 2022-9-8
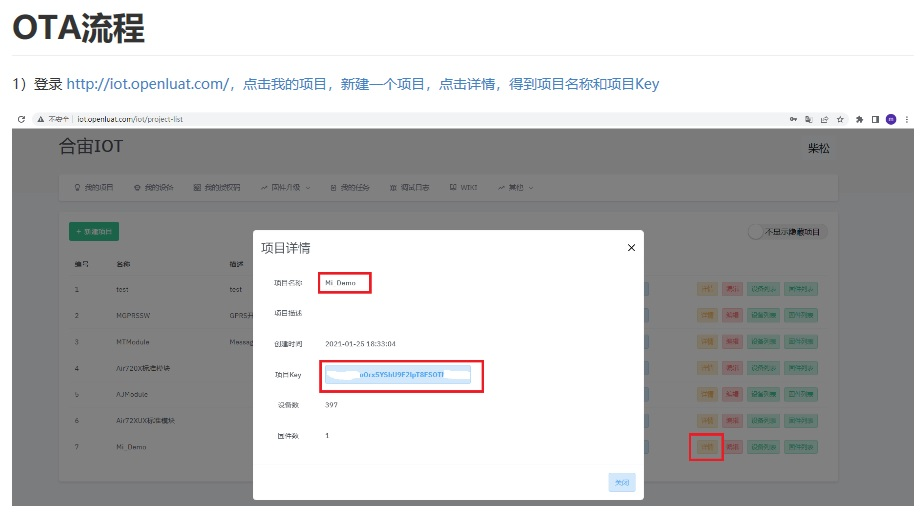
使用合宙官方平台进行固件OTA在线升级流程1)登录 http://iot.openluat.com/,点击我的项目,新建一个项目,点击详情,得到项目名称和项目Key2)打开您的项目的源文件将项目名称和项目Key添加到main.lua开头部分,并增加如下代码:--OTA升级
require "upda
miuser
天津
也试试Lua么
